

CPU 的工作模式
CPU 有以下三种工作模式:STOP 模式、STARTUP 模式和 RUN 模式。CPU 前面的状态 LED 指示当前工作模式。
在 STOP 模式下,CPU 不执行程序。您可以下载项目。
在 STARTUP 模式下,执行一次启动 OB(如果存在)。在启动模式下,CPU 不会处理中断事件。
在 RUN 模式,程序循环 OB 重复执行。可能发生中断事件,并在 RUN 模式中的任意点执行相应的中断事件 OB。可在 RUN 模式下下载项目的某些部分。
CPU 支持通过暖启动进入 RUN 模式。暖启动不包括储存器复位。执行暖启动时,CPU 会初始化所有的非保持性系统和用户数据,并保留所有保持性用户数据值。
存储器复位将清除所有工作存储器、保持性及非保持性存储区、将装载存储器复制到工作存储器并将输出设置为组态的“对 CPU STOP 的响应"(Reaction to CPU STOP)。存储器复位不会清除诊断缓冲区,也不会清除保存的 IP 地址值。
可组态 CPU 中“上电后启动"(startup after POWER ON) 设置。该组态项出现在 CPU“设备组态"(Device Configuration) 的“启动"(Startup) 下。通电后,CPU 将执行一系列上电诊断检查和系统初始化操作。在系统初始化过程中,CPU 将所有非保持性位 (M) 存储器,并将所有非保持性 DB 的内容复位为装载存储器的初始值。CPU 将保留保持性位 (M) 存储器和保持性 DB 的内容,然后进入相应的工作模式。检测到的某些错误会阻止 CPU 进入 RUN 模式。CPU 支持以下组态选项:
不重新启动(保持为 STOP 模式)
暖启动 - RUN 模式西门子6ES72221BH320XB0 西门子6ES72221BH320XB0暖启动 - 断电前的模式
可以使用编程软件在线工具中的“STOP"或“RUN"命令更改当前工作模式。也可在程序中包含 STP 指令,以使 CPU 切换到 STOP 模式。这样就可以根据程序逻辑停止程序的执行。
在 STOP 模式下,CPU 处理所有通信请求(如果适用)并执行自诊断。CPU 不执行用户程序,过程映像也不会自动更新。
启动过程
只要工作模式从 STOP 切换到 RUN,CPU 就会清除过程映像输入、初始化过程映像输出并处理启动 OB。通过“启动 OB"中的指令对过程映像输入进行任何的读访问,都只会读取零值,而不是读取当前物理输入值。因此,要在启动模式下读取物理输入的当前状态,必须执行立即读取操作。接着再执行启动 OB 以及任何相关的 FC 和 FB。如果存在多个启动 OB,则按照 OB 编号依次执行各启动 OB,OB 编号小的先执行。
每个启动 OB 都包含帮助您确定保持性数据和时钟有效性的启动信息。可以在启动 OB 中编写指令,以检查这些启动值,从而采取适当的措施
在启动过程中,CPU 还会执行以下任务:
在启动阶段,对中断进行排队但不加以处理
在启动阶段,不执行任何循环时间监视
在启动模式下,可以更改 HSC(High-Speed Counter,高速计数器)、PWM(Pulse-bbbbb Modulation,脉冲宽度调制)以及 PtP(Point-to-Point communication,点对点通信)模块的组态
只有在 RUN 模式下才会真正运行 HSC、PWM 和点对点通信模块
执行完启动 OB 后,CPU 将进入 RUN 模式并在连续的扫描周期内处理控制任务。
紧凑型 CPU 1214C 具有:
· 3 种设备类型,带有不同的电源和控制电压
· 集成的电源,可作为宽范围交流或直流电源(85 至 264 V 交流或 24 V 直流)
· 集成的 24 V 编码器/负载电流源:
用于直接连接传感器和编码器。400 mA 的输出电流也可用作负载电源
· 14 点集成 24 V 直流数字量输入(漏电流/源电流(IEC 1 型漏电流))
· 10 点集成数字量输出,24 V 直流或继电器
· 2 点集成模拟量输入,0 至 10 V
· 2 点脉冲输出 (PTO),频率高达 100 kHz
· 脉冲宽度调制输出 (PWM),频率高达 100 kHz
· 集成以太网接口(TCP/IP native、ISO-on-TCP)
· 6 个快速计数器(3 个频率为 100 kHz;3 个频率为 30 kHz),带有可参数化的使能和复位输入,可以同时用作带有 2 点单输入的加减计数器,或用于连接增量型编码器
· 通过附加通讯接口扩展,例如,RS485 或 RS232
· 通过信号板使用模拟或数字信号直接在 CPU 上扩展(保持 CPU 安装尺寸)
电源(PS)
电源模块提供了机架和CPU内部的供电电源,置于1号机架的位置。
(2)处理器(CPU)
CPU存储并处理用户程序,为模块分配参数,通过嵌入的MPI总线处理编程设备和PC、模块、其它站点之间的通讯,并可以为进行DP主站或从站操作装配一个集成的DP接口。置于2号机架。
(3)接口模块(IM)
接口模块将各个机架连接在一起。不同型号的接口模块可支持机架扩展或PROFIBUS DP连接。置于3号机架,没有接口模块时,机架位置为空。
(4)信号模块(SM)
通常称为I/O(输入/输出)模块。测量输入信号并控制输出设备。信号模块可用于数字信号和模拟信号,还可用于进行连接,如传感器和启动器的连接。
(5)功能模块(FM)
用于进行复杂的、重要的但立于CPU的过程,如:计算、位置控制和闭环控制。
(6)通讯处理器(CP)
模块化的通讯处理器通过连接各个SIMATIC站点,如:工业以太网,PROFIBUS或串行的点对点连接等。
后三个模块在机架上可以任意放置,系统可以自动分配模块的地址。
需要说明的是,每个机架只能安装8个信号模块、功能模块或通讯模块。如果系统任务超过了8个,则可以扩展机架(每个带CPU的机架可以扩展3个机架)。
各个模块的性能具体如下:
(1)电源模块(PS)
电源模块用于将SIMATIC S7-300 连接到120/230V AC电源。
(2)CPU模块
各种CPU 有各种不同的性能,例如,有的CPU 上集成有输入/输出点,有的CPU上集成有PROFI- BUS-DP通讯接口等。
以上只是列出了部分指标,设计时还要参看相应的手册。
(3)接口模块
接口模块用于多机架配置时连接主机架(CR)和扩展机架 (ER)。S7-300通过分布式的主机架(CR)和3个扩展机架(ER),可以操作多达32个模块。运行时无需风扇。
(4)信号模块
信号模块用于数字量和模拟量输入/输出,又分DI/DO(数字量输入/输出)和AI/AO(模拟量输入/输出)模块。
①数字量输入模块:
②数字量输出模块:
③数字输入/输出模块:
④继电器输出模块:
⑤模拟量输入模块
⑥模拟量输出模块:
⑦模拟量输入/输出模块:
(5)功能模块
西门子S7-300功能模块模块适用于各种场合,功能块的所有参数STEP7中分配,操作方便,而且不必编程。包括:计数器模块(FM350),定位模块(FM351),凸轮控制模块(FM352),闭环控制模块(FM355)等许多用于特定场合的模块。
(6)通讯模块(CP)
S7-300通讯模块是用于连接网络和点对点通讯用的模块,比如:用于S7-300和SIMATIC C7通过PROFIBUS通讯的模块CP343-5,用于S7-300和工业以讯的模块CP343-1及CP343-1 IT等
CP 243-1 是一种通讯处理器,设计用于在S7-200 自动化系统中运行。它可用于将S7-200 系统连接到工业以太网(IE)中。CP 243-1 有助于 S7 产品系列通过因特网进行通讯。因此,可以使用STEP 7 Micro/WIN 32,对S7-200 进行远程组态、编程和诊断。而且,一台S7-200 还可通过以太网与其它S7-200、S7-300 或S7-400 控制器进行通讯。并可与OPC 服务器进行通讯。
在开放式SIMATIC NET 通讯系统中,工业以太网可以用作协调级和单元级网络。在技术上,工业以太网是一种基于屏蔽同轴电缆、双绞电缆而建立的电气网络,或一种基于光纤电缆的光网络。工业以太网根据标准IEEE 802.3 定义。
确保强弱电没有混合到一起因为PLC电源为v,一旦因为接线错误V接进PLC里,很容易将PLC或者拓展模块烧毁。二检查PLC外部回路,也就是俗称的“打点"电源确认完毕后送电,输入输出点,这就是俗称的“打点",IO点需要挨个,包括操作按钮,急停按钮,操作指示灯以及气缸及其限位开关等等,具体方法是一人在现场侧操作按钮等,另一人在PLC测输入输出信号;对于大型系统应该建立表,即后做好标记。
禁止循环中断的事件会影响所有的优先级。此处可以参见这两个SFC的在线帮助。循环中断检查是否在循环程序中使用SFC“DIS_AIRT"了不希望出现的循环中断或者中断驱动的程序,结果造成这些中断或者程序丢失。使用SFC“DIS_AIRT",可以处理优先级高于当前OB的循环中断OB。可以在OB中多次调用SFC。操作系统会计算调用SFC的,处理一直有效,除非使用SFC“EN_AIRT"取消使用SFC设置的中断,或者直到处理完当前OB为止。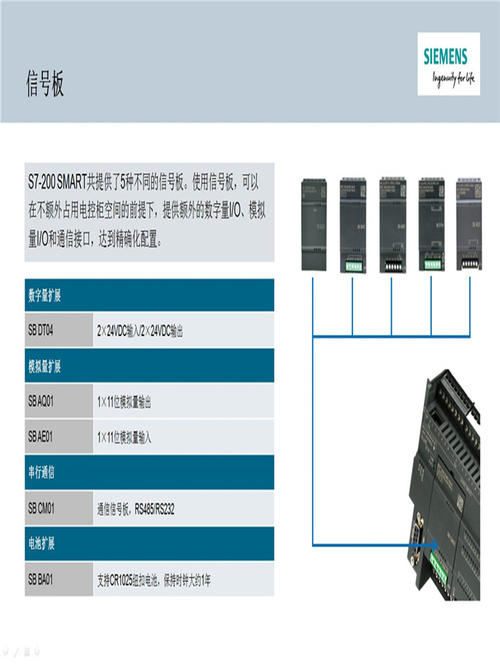
S7 1200 的USS库
USS_DRV 功能块是S7-1200 USS通信的主体功能块,接受变频器的信息和控制变频器的指令都是通过这个功能快来完成的。必须在主 OB中调用,不能在循环中断OB中调用。
USS_PORT功能块是S7-1200与变频器USS通信的接口,主要设置通信的接口参数。可在主OB或中断OB中调用。
USS_RPM功能块是通过USS通信读取变频器的参数。必须在主 OB中调用,不能在循环中断OB中调用。
USS_WPM功能块是通过USS通信设置变频器的参数。必须在主 OB中调用,不能在循环中断OB中调用。
这些功能块与变频器之间的控制关系如下图所示:
USS 通信功能块与变频器的控制关系
USS_DRV功能块通过USS_DRV_DB数据块实现与USS_PORT功能块的数据接收与传送,而USS_PORT功能块是S7-1200 PLC CM1241 RS485模块与变频器之间的通信接口。USS_RPM功能块和USS_WPM功能块与变频器的通信与USS_DRV功能块的通信方式是相同的。
每个S7-1200 CPU多可带3个通信模块,而每个CM1241 RS485通信模块多支持16个变频器。因此用户在一个S7-1200 CPU中多可建立3个USS网络,而每个USS网络多支持16个变频器,总共多支持48个USS变频器。
5. 2 S7 1200 PLC进行USS通信的编程
1.USS通信接口参数功能块的编程
USS通信接口参数功能块的编程如下图所示。
USS通信接口参数功能块的编程
USS_PORT功能块用来处理USS网络上的通信,它是S71200 CPU与变频器的通信借口。每个CM1241 RS485模块有且必须有一个USS_PORT功能块。
PORT:指的是通过个通信模块进行USS通信。
BAUD:指的是和变频器进行通行的速率。 变频器的参数P2010种进行设置。
USS_DB:指的是和变频器通信时的USS数据块。每个通信模块多可以有16个USS数据块,每个CPU多可以有48个USS数据块,具体的通信情况要和现场实际情况相联系。每个变频器与S7-1200进行通信的数据块是的。
ERROR:输出错误。
STATUS:扫描或初始化的状态。
S7-1200 PLC与变频器的通信是与它本身的扫描周期不同步的,在完成一次与变频器的通信事件之前,S7-1200通常完成了多个扫描。
USS_PORT通信的时间间隔是S7-1200与变频器通信所需要的时间,不同的通信波特率对应的不同的USS_PORT通信间隔时间。下图列出了不同的波特率对应的USS_PORT小通信间隔时间。
不同的波特率对应的USS_PORT小通信间隔时间
USS_PORT在发生通信错误时,通常进行3次尝试来完成通信事件,那么S7-1200与变频器通信的时间就是USS_PORT发生通信超时的时间间隔。例如:如果通信波特率是57600,那么USS_PORT与变频器通信的时间间隔应当大于小的调用时间间隔,即大于36.1Ms而小于109Ms。S7-1200 USS 协议库默认的通信错误超时尝试次数是2次。
基于以上的USS_PORT通信时间的处理,我们建议在循环中断OB块中调用USS_PORT通信功能块。在建立循环中断OB块时,我们可以设置循环中断OB块的扫描时间,以满足通信的要求。
5. 3 S7 1200 PLC进行USS通信的调试
S7-1200 PLC 通过CM1241 RS485模块与变频器进行USS通信时,需要注意如下几点:
当同一个CM1241 RS485 模块带有多个(多16个)USS变频器时,这个时候通信的USS_DB是同一个,USS_DRV功能块调用多次,每个USS_DRV功能块调用时,相对应的USS站地址与实际的变频器要一致,而其它的控制参数也要一致。
当同一个S7-1200 PLC 带有多个CM1241 RS485模块(多3个)时,这个时候通信的USS_DB相对应的是3个,每个CM1241 RS485模块的USS网络使用相同的USS_DB,不同的USS网络使用不同的USS_DB。
当对变频器的参数进行读写操作时,注意不能同时进行USS_RPM和USS_WPM的操作,并且同一时间只能进行一个参数的读或者写操作,而不能进行多个参数的读或者写操作。
PS:对于西门子SITOP为什么会有PLC供电电源,可以从三个维度来总结。
① 外观匹配PLC;
② 电气性能上,的SIMATIC电源匹配PLC工作电压上限28.8V;
③ 优异的电磁兼容性,EMC纹波。
2)非西门子PLC:
系统电源:第三方电源/SITOPModular/Smart/Lite
电源: SITOP Modualr/Smart/Lite/PM207
3)专机、单片机、工控机:
系统和电源: SITOP Modualr/Smart/Lite/PM207
无论是哪种情况,SITOP电源无处不在,只是西门子PLC供电电源的选择是毋庸置疑的。
三、从系统的可扩展性和兼容性的方面来说
市场上控制类产品繁多,无论DCS还是PLC,均有很多厂商在生产和销售。对于PLC系统来说,一般没有或很少有扩展的需求,因为PLC系统一般针对于设备来使用。一般来讲,PLC也很少有兼容性的要求,比如两个或以上的系统要求资源共享,对PLC来讲也是很困难的事。而且PLC一般都采用的网络结构,比如西门子的MPI总线性网络,甚至增加一台操作员站都不容易或成本很高。
DCS在发展的过程中也是各厂家自成体系,但大部分的DCS系统,比如西门子、ABB、霍尼维尔、GE、施耐德等等,虽说系统内部(过程级)的通讯协议不尽相同,但操作级的网络平台不约而同的选择了以太网络,采用标准或变形的TCP/IP协议。这样就提供了很方便的可扩展能力。在这种网络中,控制器、计算机均作为一个节点存在,只要网络到达的地方,就可以随意增减节点数量和布置节点位置。另外,基于windows系统的OPC、DDE等开放协议,各系统也可很方便的通讯,以实现资源共享。
四、从数据库来说
DCS一般都提供统一的数据库。换句话说,在DCS系统中一旦一个数据存在于数据库中,就可在任何情况下引用,比如在组态软件中,在软件中,在趋势图中,在报表中……而PLC系统的数据库通常都不是统一的,组态软件和软件甚至归档软件都有自己的数据库。为什么常说西门子的S7 400要到了414以上才称为DCS?因为西门子的PCS7系统才使用统一的数据库,而PCS7要求控制器起码到S7 414-3以上的型号。
五、从时间调度上来说
PLC的程序一般不能按事先设定的循环周期运行。PLC程序是从头到尾执行一次后又从头开始执行。(现在一些新型PLC有所改进,不过对任务周期的数量还是有限制)而DCS可以设定任务周期。
六、从应用对象的规模上来说
西门子CPU1211C参数介绍PLC一般应用在小型自控场所,比如设备的控制或少量的模拟量的控制及联锁,而大型的应用一般都是DCS。当然,这个概念不太准确,但很直观,习惯上我们把大于600点的系统称为DCS,小于这个规模叫做PLC。我们的热泵及QCS、横向产品配套的控制系统一般就是称为PLC。
以上是简单概括了两者的区别之处。严格的说,PLC与DCS现在已经不能*一刀切开了,两者关系已经很模糊的说。
博途TIA的配置
在博途软件中新建项目,本案选取西门子S7-300PLC,其型号为CPU 313C-2DP,该PLC 为集成式的PLC,自带PROFIBUS-DP口,可以作为主站也可以作为从站,在本案中,PLC作为主站。
S7-200 SMART CPU能否支持5 V编码器?
ST20、ST30 CPU的I0.0~I0.3,I0.6~I0.7,ST40、ST60 CPU的I0.0~I0.3可以支持。
5.S7-200 SMART CPU能否连接差分输出的编码器?
不能。由于查分数出的信号需要的差分信号件,而S7-200 SMART CPU不具备这样的差分接口,所以无法直接连接差分输出的编码器。
6.为什么高速计数器不能正常工作?
在程序中要使用初次扫描存储器位SM0.1来调用HDEF指令,而且只能调用一次。如果用SM0.0调用或者第二次执行HDEF指令会引起运行错误,而且不能改变一次执行HDEF 指令时对计数器的设定。
7.对高速计数器如何寻址? 为什么从SMDx中读不出当前的计数值?
可以直接用HC0;HC1;HC2;HC3;HC4;HC5对不同的高速计数器进行寻址读取当前值,也可以在状态表中输入上述地址直接监视高速计数器的当前值。SMDx不存储当前值,参见上述表2。
高速计数器的计数值是一个32位的有符号整数。
8.高速计数器如何复位到0?
选用带外部复位模式的高速计数器,当外部复位输入点信号有效时,高速计数器复位为0
也可使用内部程序复位,即将高速计数器设定为可更新初始值,并将初始值设为0,执行HSC指令后,高数计数器即复位为0
9.高速计数器的值在复位后是复位到初始值还是“0"值?
外部复位会将当前值复位到0值而不是初始值;内部复位则将当前值复位到初始值(若初始值设为"0“,则内部复位也是复位到"0“值)。如果你设定了可更新初始值,但在中断中未给初始值寄存器赋新值,则在执行HSC 指令后,它将按初始化时设定的初始值赋值。
10.为何给高速计数器赋初始值和预置值时后不起作用,或效果出乎意料?
高速计数器可以在初始化或者运行中更改设置,如初始值、预置值。其操作步骤应当是:
设置控制字节的更新选项。需要更新哪个设置数据,就把控制字节中相应的控制位置位(设置为“1");不需要改变的设置,相应的控制位就不能设置
然后将所需 的值送入初始值和预置值控制寄存器
西门子PLC 移位指令及应用:可使用移位指令向左或向右逐位移动输入 IN 的内容(另请参阅 CPU 寄存器)。向左移动 n 位相当于将输入端 IN 的内容乘以 2 的 n 次幂(2 n);向右移动 n 位则相当于将输入端 IN 的内容除以 2 的 n 次幂(2n)。例如,如果将等价于十进制值 3 的二进制数左移 3 位,将得到等价于十进制值 24 的二进制数。
西门子变频器
详细使用及方法介绍说明如果将等价于十进制值 16 的二进制数右移 2 位,则会得到等价于十进制值 4 的二进制数。可提供给输入参数 N 的数值决定了移动相应值的位数。移位指令产生的空位将用零或符号位的信号状态(0 表示正,1 表示负)来填补。*移动的位的信号状态将装入状态字的 CC1 位中。状态字的 CC0 和 OV 位将复位为 0。您可以使用跳转指令判断 CC1 位。
西门子PLC 移位指令根据不同参数调整以及数据类型,可用于SHR_I(整数右移)、SHR_DI(长整数右移)、SHL_W(字左移)、SHR_W(字右移)、SHL_DW(双字左移)以及SHR_DW(双字右移)。
属性
数字量输入模块 SM 321; DI 8 x AC 120/230 V ISOL 的属性:
8 点输入,按每组 1 个电气隔离
额定输入电压 120/230 VAC
适用于开关以及 2-/3-/4 线 AC 接近开关
西门子CPU1211C西门子S7-1200授权中国总代理
西门子CPU1211C西门子S7-1200授权中国总代理
西门子CPU1211C西门子S7-1200授权中国总代理
CPU1212C授权代理西门子1200plcPLC模块目前,SIMATIC PLC 正在执行越来越多的功能,原本需要*不同技术。 对您来说,一切都变得更加容易,更加一致,更加经济
基本型控制器
基本型控制器是适合中低端应用的智能控制器。包括标准型和安全型。通过其集成输入和输出以及工艺功能,可实现高性价比的紧凑解决方案。使用基本型控制器,可通过集成和可选通信接口,实现联网简便的灵活解决方案。
基本型控制器可在 TIA 博途平台中进行组态和编程。工程组态效率高,而且,随着应用复杂性的增加,还可方便地转为使用型控制器。
SIMATIC S7-1200 系列包括以下模块:
性能分级的不同型号紧凑型控制器,以及丰富的交/直流控制器。
各种信号板卡(模拟量和数字量),用于在 CPU 上进行经济的模块化控制器扩展,同时节省安装空间。
各种数字量和模拟量信号模块。
各种通信模块和处理器。
带 4 个端口的以太网交换机,用于实现各种网络拓扑
SIWAREX 称重系统终端模块
PS 1207 稳压电源装置,电源电压 115/230 V AC,额定电压 24 VDC
西门子系统(MED)集团是中国公共卫生领域的供应商,以其创新的科技、高质量的服务和完善的解决方案著称,它向客户提供切实而有效的解决方案。近年来系统集团的销售额和*均实现了快速增长,这得益于上海西门子器械有限公司扩大了CT和X光系统的研发和生产能力,并且向市场推出了一系列的新产品,较为突出的成果包括于2002年8月安装到北京协和的中国部16层CT扫描仪SOMATOM Sensation 16,以及自2003年1月起在中国生产的高性能CT系统SOMATOM欢悦等。这些产品能够为中国的提供高质量的影像产品,帮助对病人进行快速诊断和。同时集团高素质的们通过集团的热线服务系统,昼夜不停地对中国用户的需求作出响应,设立在北京和上海的"UPTIME"服务中心可以为*的西门子设备提供远程操控与维护。
西门子S7-1200CPU1211C控制单元西门子S7-1200CPU1211C控制单元西门子S7-1200CPU1211C控制单元
在照明领域,西门子的全资子公司欧司朗是的照明解决方案供应商,提供普通和自动化应用的灯泡和照明系统,并且为不同的应用领域。2003财年中欧司朗为包的品牌。博西家用电器(BSH)面向中国的消费者制造和推出高品质和创新的电冰箱和滚筒洗衣机等家电产品,其产品以西门子的商标在中国家电市场上领风,而广泛的售后服务网络则为用户提供了快速有效的服务。
CTRL_HSC 指令通常放置在触发计数器硬件中断事件时执行的硬件中断 OB 中。 例如, 如果 CV=RV 事件触发计数器中断,则硬件中断 OB 代码块执行 CTRL_HSC 指令并且可通过装载 NEW_RV 值更改参考值。西门子S7-1200PLC卡件CPU1211C
在 CTRL_HSC 参数中没有提供当前计数值。 在高速计数器硬件的组态期间分配存储当前计数值的映像地址。 可以使用程序逻辑直接读取计数值。 返回给程序的值将是读取计数器瞬间的正确计数。 但计数器仍将继续对高速事件计数。 因此,程序使用旧的计数值完成处理前,实际计数值可能会更改
 点击交流
点击交流